
Náš STM8S208RB má na těle celkem čtyři časovače: TIM1, TIM2, TIM3 a TIM4.
TIM4¶
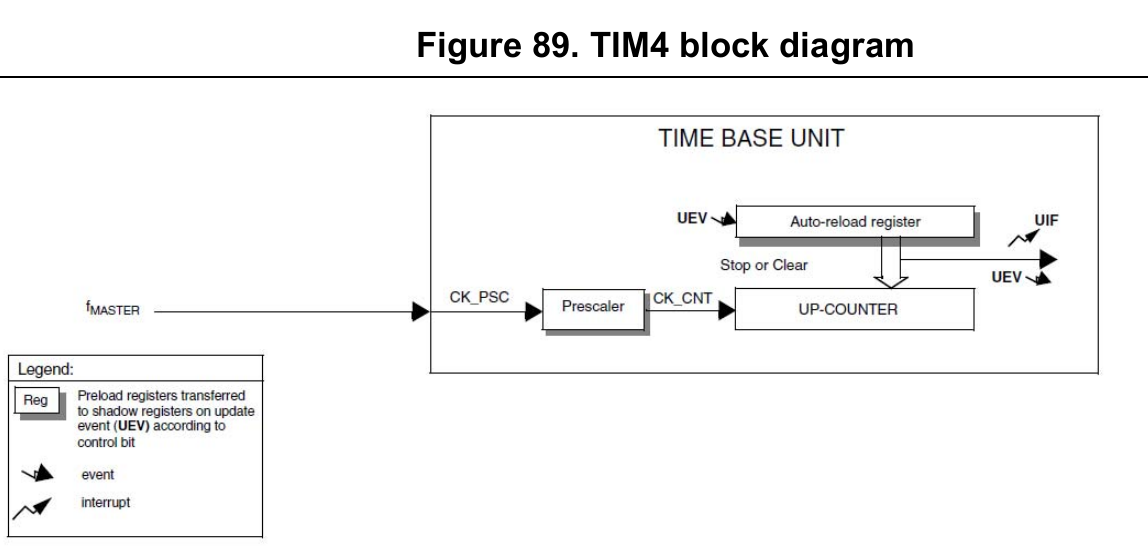
TIM4 je nejjednodušší. Čítač je 8-bitový a předdělička umožňuje dělit kmitočet /1, /2, /4, /8, /16, /32, /64 a /128. Auto-reload register říká kam až se bude čítat — tedy nastavuje strop časovače.
Nastavení se děje pomocí funkce TIM4_TimeBaseInit(PRESCALER, PERIOD), kde
PRESCALER je makro, pro nastavení děličky a PERIOD je 8-bitové číslo.
1 | |
Takže pokud máme nastaven kmitočet na 16MHz znamená to že čítač čítá do hodnoty
125 (respektive 124 protože čítáme od nuly) s frekvencí 16MHz/128 == 125 kHz.
Znamená to tedy, že každou milisekundu dojde k auto-reloadu a je vyvoláno
přerušení od časovače TIM4.
Aby vše fungovalo musíme:
- povolit TIM4
- povolit přerušení od TIM4
- globálně povolit přerušení
- napsat tělo obslužné rutiny přerušení.
1 2 3 4 5 6 | |
Rutina přerušení se standardně nachází v souboru stm8_it.c. Stačí ji najít
přepsat. Pokud potřebujete v rutině přerušení pracovat s proměnnou definovanou v main.c (což je myslím téměř vždy) je třeba tuto proměnnou označit direktivou extern nebo rutinu přesunout přímo do souboru main.c.
Více o tom se dočtete v postu
Kompilace a knihovny.
1 2 3 4 5 6 | |
Všimněte si prosím, že první, co se v rutině přerušení dělá, je, že se vymaže vlajka, která označuje, že k přerušení došlo.
Tento kód je například použito v knihovně milis, která umožňuje zjistit počet milisekund uplynulých od “spuštění programu”.
TIM2 a TIM3¶
TIM2 a TIM3 je trochu složitější, ale zde ukážeme jen jeho základní použití. (PWM necháme na samostatný post: Použití časovače jako generátoru PWM)
TIM2/3 je 16 bitový — může tedy čítat do 65535 a předdělička umožňuje dělit /1, /2, /4, /8, /16, /32, /64, /128, /256, /512, /1024, /2048, /4096, /8192, /16384 a /32768.
Takže například pokud vytváříme cokoli, co pracuje s časem a potřebujeme spustit určitý kód vždy přesně v intervalu \(1\,\mathrm{s}\), může inicializace časovače vypadat například takto:
1 2 3 4 5 | |
nastavení TIM3 je analogické:
1 2 3 4 | |
No a ještě rutiny přerušení… Opět platí, že rutiny přerušení buď necháme v souboru
stm8_it.c a proměnné označíme pomocí direktivy extern nebo si rutiny
přesuneme do modulu/souboru ve kterém je proměnná definována.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | |
Zdrojové kódy¶
Kompletní zdrojové kódy naleznete v repositáři na GitHubu:
https://github.com/spseol/STM8-TIM23-zaklad