Zvuk je jak známo mechanické vlnění. Pro jeho vyloudění tedy potřebujeme nějaký “vlnič” — tedy elektro-akustický měnič.

Nejjednodušší je asi použít piezo měnič. Ten má ovšem poněkud omezený frekvenční rozsah. Jeho frekvenční charakteristika může vypadat například takto:
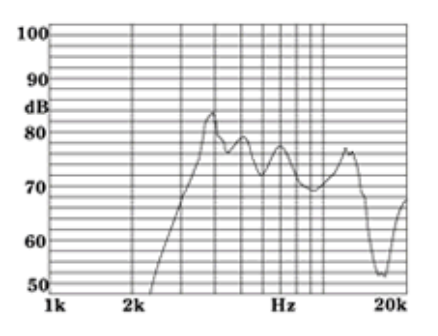
(Mimochodem prý existuje nějaký výzkum, podle kterého optimální frekvence pro budík je 100 Hz; nebo to bylo 300 Hz? Prostě poměrně nízký kmitočet. Ale levné bezporuchové piezo-měniče takto nízko prostě nejdou. Tak na nás ty budíky pískají a pípají a my vstáváme potom naštvaní.)
Další možností je použít reproduktorek. V tomto případě je třeba posílit výstup tranzistorem. Zapojení tedy může vypadat například takto:
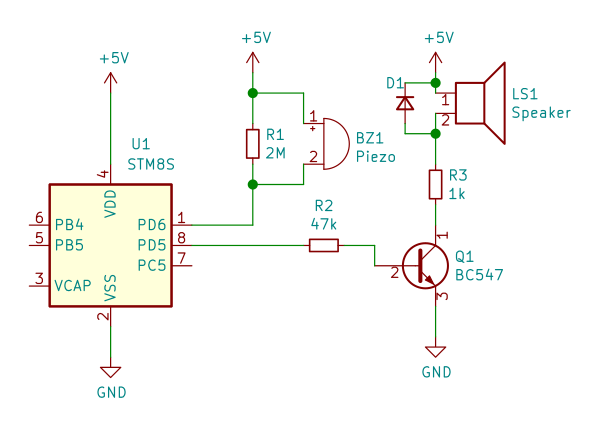
Tranzistor je ve spínacím režimu a membrána reproduktoru má pouze dvě polohy. Tedy klidovou polohu (bez proudu) nebo výchylku odpovídající kladnému proudu. Do výchylky odpovídající zápornému proudu se membrána nedostane, protože proud protéká vždy jedním směrem. Dioda D1 vybíjí cívku reproduktoru, při sestupné hraně.
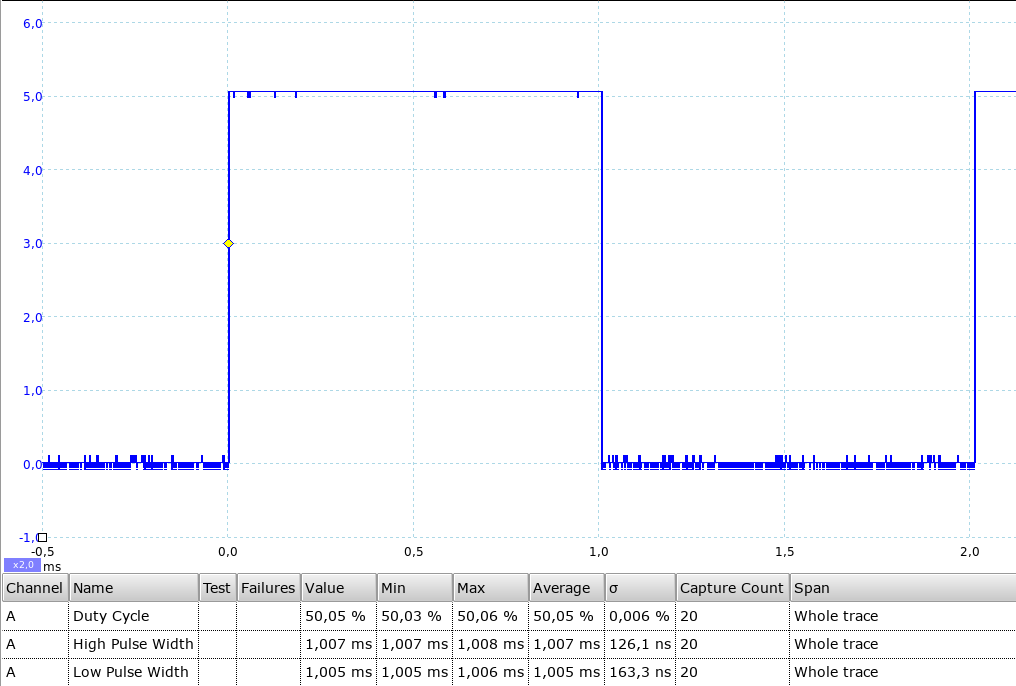
Program, který nám vyloudí frekvenci \(500\,\mathrm{Hz}\) může vypadat například takto. Perioda je \(2\,\mathrm{ms}\). Půl periody tedy \(1\,\mathrm{ms}\).
1 2 3 4 5 6 7 8 9 10 11 | |
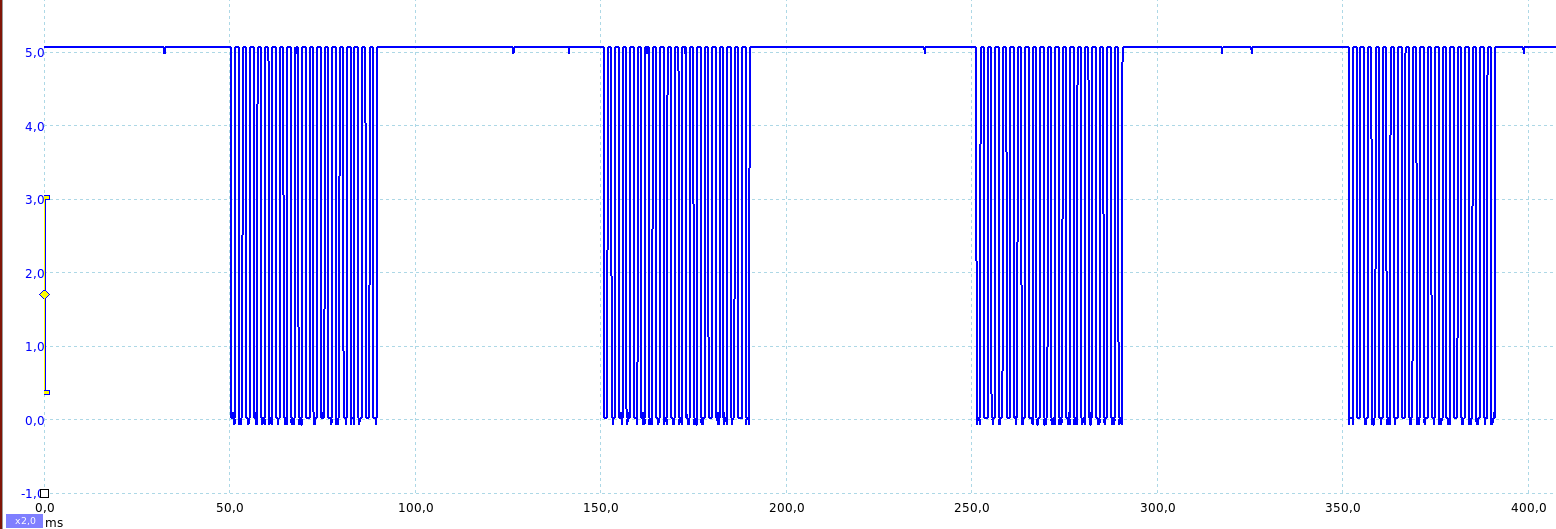
Pokud chci jen pípnout a poté nechat chvilku ticho jednoduše nebudu cvičit s membránou do nekonečna, ale pouze několikrát (\(20 \cdot 2\,\mathrm{ms}\)) a pak nechám chvilku ticho.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | |
Tento způsob práce je ale blokující, protože se pořád jen čeká. Mikroprocesor vlastně pořádně nemůže dělat nic jiného. Proto použijeme multitasking 1 a stavový automat.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 | |
Zdrojové kódy¶
Kompletní zdrojové kódy naleznete v repositáři na GitHubu:
https://github.com/spseol/STM8-zvuk-zaklad
Beeper¶
Také je dobré poznamenat, že dnešní mikroprocesory mají pro generování zvuků nízkých kmitočtů vlastní periferii nazvanou Beeper. Její použití bude pro váš program jistě jednodušší než si zvuk generovat samy. Ne nedá se nastavit libovolný kmitočet a krok je poměrně hrubý; ale často to potřebám jednoduché zvukové signalizace plně postačí.
Více o této periferii nejdete v Michalově článku.